강의 영상 출처 : https://www.youtube.com/watch?v=hE7eGew4eeg
Few-shot Learning이란?
매우 적은 수의 샘플을 기반으로 분류 또는 회귀를 수행하는 것을 의미한다.
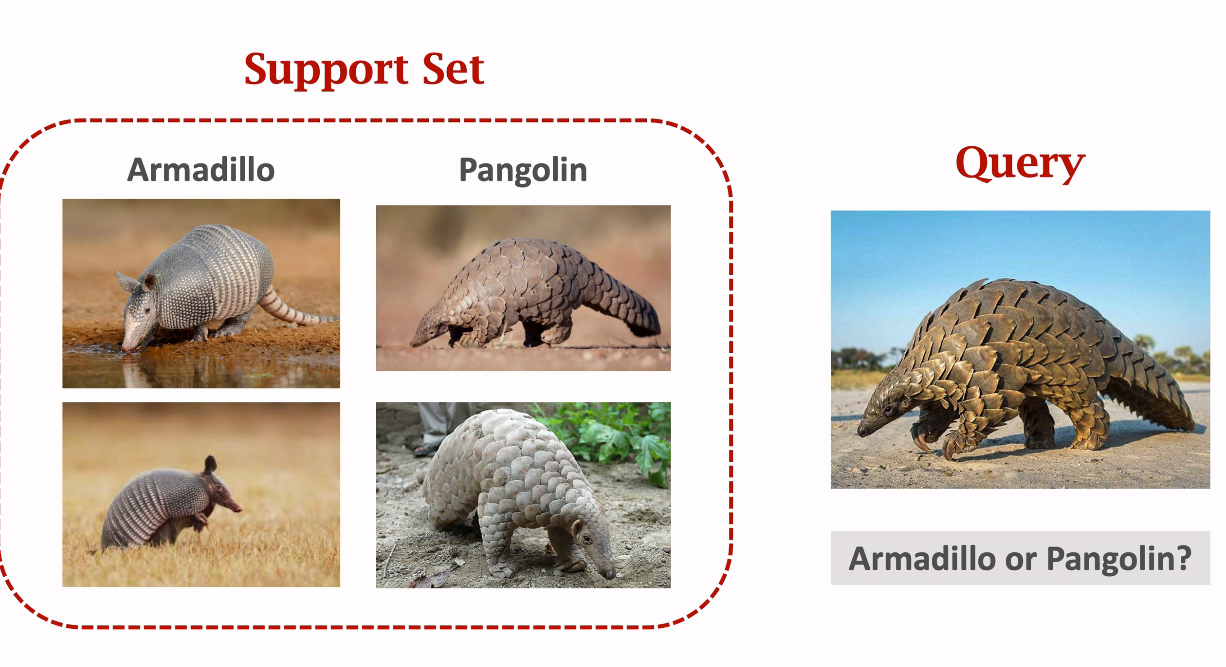
위의 그림을 보면 Armadillo 사진 두 장, Pangolin(천산갑) 사진 두 장이 있다. 왼쪽의 4장의 사진을 보고 우리는 오른쪽의 사진이 천산갑이라는 사실을 잘 알아낼 수 있을 것이다. 즉, 4장의 사진만을 갖고도 카테고리를 잘 분류해낼 수 있다는 것이다.
그러나 컴퓨터도 그러할까? 컴퓨터가 위 둘을 구분하기에 4장의 사진은 너무 적을 것이다.
다음의 용어를 기억하자. : Support set & Query
Support set : A small set of samples. 모델을 학습시키기엔 굉장히 적은 수의 샘플들.
Few-shot learning은 supervised learning과는 다르다.
few-shot learning의 목표는 모델이 training set의 이미지를 인지하고 test set을 일반화하는 것이 아니다.
few-shot learning의 목표는 'Learn to Learn'이다.
'Learn to Learn'은 다음과 같이 이해하면 된다.
- 굉장히 큰 training set을 지닌 모델을 훈련시킨다.
- 훈련의 목표는 무엇이 코끼리인지, 무엇이 호랑이인지를 아는 것이 아니다.
- 목표는 안 보이는 코끼리와 호랑이들을 인지할 수 있는 것이 아니다.
- few shot learning의 목표는 객체 간의 유사점과 차이점을 아는 것이다.

훈련이 끝난 후, 당신은 두 개의 이미지를 모델에게 보여주며 두 동물이 같은 종류의 동물인지 물어볼 수 있을 것이다.
모델은 객체 간 유사점과 차이점을 알아냈을 것이고, 모델은 두 이미지가 같은 객체라는 것을 알려줄 수 있을 것이다.
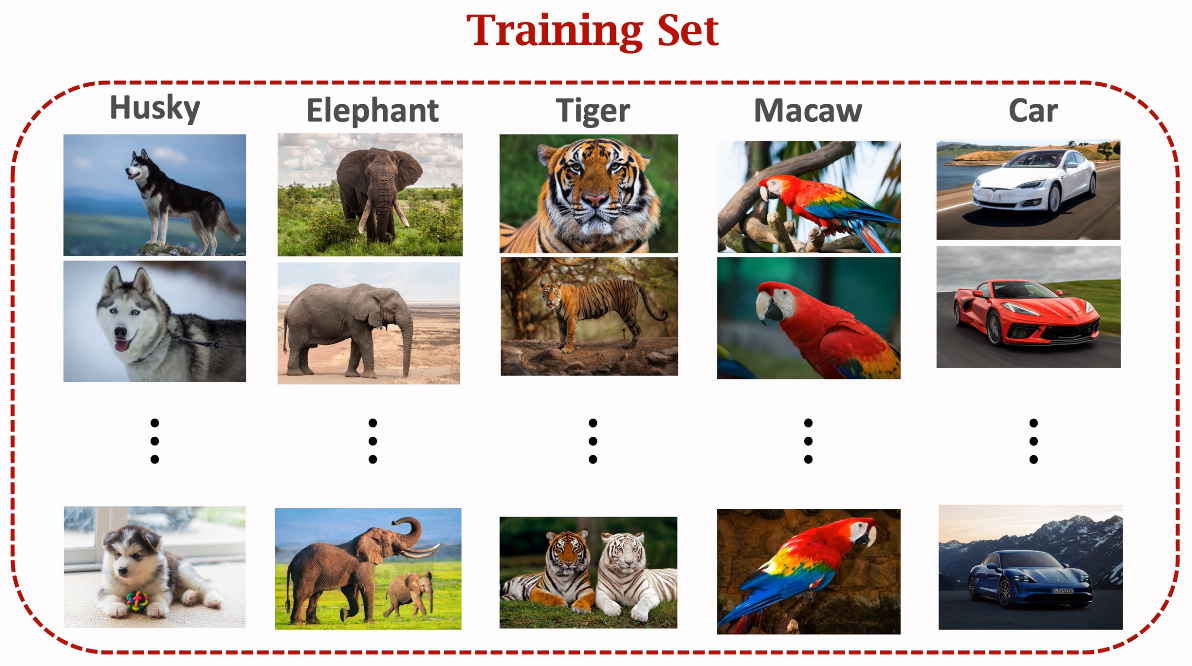
training set를 확인해보자. training data는 5개의 클래스가 있고, 다람쥐 클래스가 포함되어 있지 않다.
그러므로 모델은 다람쥐를 인지하지 못할 것이다.
만약 모델에게 위에 다람쥐 사진 두 개를 보여주면 모델은 그것들이 다람쥐인지 모를 것이다.
그러나 둘이 비슷하다는 것을 알 수 있을 것이다.
그에 따라 모델은 위의 두 사진이 같은 종류인 것을 높은 확신을 갖고 알려줄 것이다.

그렇다면 위의 사진은 어떨까? 모델에는 천산갑과 멍멍이 클래스가 없다.
그러나 모델은 위 두 사진이 다르다는 것을 알 것이다.
그래서 위 두 사진은 다른 종류라는 것을 알려줄 수 있을 것이다.

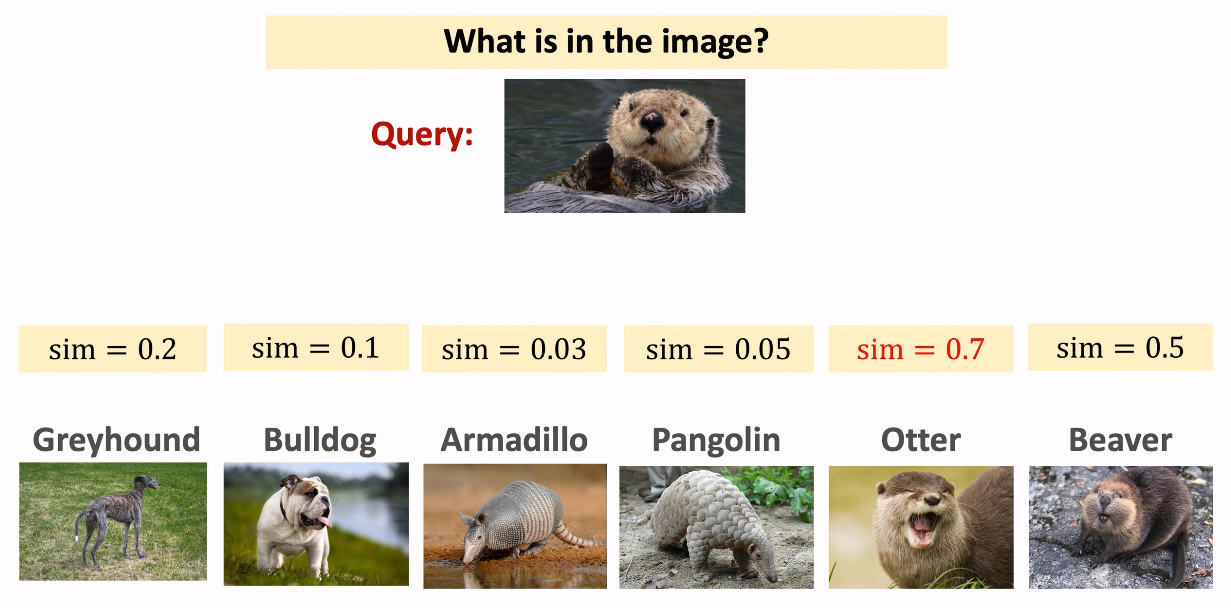
질문을 달리 해보자. 모델에게 위의 Query를 주고 무엇인지 물어보면
위 객체는 training set에서 확인하지 못하는 클래스이기 때문에
모델은 답을 내주지 못할 것이다.

다음의 6개 추가적 정보를 모델에게 주어준다.
이제 모델은 query 이미지와 각각의 6개 support 이미지를 비교한 후 query 이미지가 otter 이미지와 가장 비슷한 것을 찾아낼 수 있을 것이다.
"Support set"은 meta learning의 특수 용어이다.
레이블링된 적은 수의 이미지 세트를 support set라고 칭한다.
training set = 모든 클래스의 샘플 수가 많다!
support set = 모든 클래스의 샘플 수가 적다!
support set로 학습을 할 수 있는 건 아니고 그저 test 때 추가적인 정보만을 부여하는 것이다.
위까지가 few-shot learning의 basic idea이다.
Few-shot learning & Meta Learning
Few-shot learning은 meta-learning의 일종이다.
meta-learning은 전통적 supervised learning과는 차이가 있다.
전통적 지도학습은 모델이 훈련 데이터를 인지했는지 묻고, 보지 못했던 테스트 데이터를 일반화한다.
그와는 다르게, meta learning의 목표는 learn to learn이다.
learn to learn을 어떻게 이해할 수 있을까?
당신이 아이를 데리고 동물원에 갔다고 가정하자.
아이는 처음으로 물에 사는 귀여운 수달을 마주했다.

그 후 다음의 동물 카드들을 주어줍니다.

아이는 동물원에 있는 동물이 수달이라는 사실을 가르침받은 적이 없으나,
카드의 수달과 마주하고 있는 동물이 동일하다는 사실을 알아낼 수 있을 것이다.
이는 아이에게 동물이 수달이라고 가르치는 것이 아닌,
아이가 스스로 배우도록 가르친 것이고 이러한 과정을 'meta-learning'이라고 한다.
다시 한 번 Supervised learning과 few shot learning의 차이에 대해 살펴보도록 하자.
우선 모델은 대규모 훈련 셋에 의해 학습된다.
Supervised learning의 경우
- 테스트 샘플들은 이전에 한 번도 보지 못했던 것들이다. (훈련 셋에 없는 데이터)
- 그러나 테스트 샘플들은 모델이 아는 클래스에 속해 있다.
Few-shot learning의 경우
- Query 샘플들은 이전에 한 번도 보지 못했던 것들이다.
- 그리고 Query 샘플들은 모델이 알지 못하는 클래스이다. <- 이것이 Supervised learning과의 가장 큰 차이이다.
- 그렇기 때문에 모델에게 추가적 정보를 더 제공해주어야 한다. (Support Set)
- query와 support set을 비교하며 모델은 가장 비슷한 클래스를 찾아낸다.
그렇게 train set에서 보지 못한 데이터에 대해서 추가적 정보를 주어주기 위해 Support Set이 필요한데,
여기에서 k-way n-shot Support Set의 개념이 나온다.
k-way란? Support set이 같는 k개의 클래스들을 의미한다.
n-shot이란? 모든 클래스들이 갖는 n개의 샘플 수를 의미한다.
즉, 위 사진 같은 경우는 6개의 클래스가 각각 1개의 샘플을 갖는
6-way 1-shot Support Set이 되는 것이다.

few-shot learning의 정확도같은 경우 way(Support Set의 클래스 수)가 많아지면 많아질수록 더 떨어진다.
이는 생각해보면 간단한 문제다.
객관식 문제를 푼다고 생각했을 때, 답안이 3개가 있는게 쉬운가, 6개가 있는게 쉬운가?
3개가 있는게 훨씬 답을 찾아내기 쉬울 것이다.
이와 같이 few-shot learning도 way가 많아지면 많아질수록 답을 찾아내기 버거워하는 것이다.

반대로 shot(Support Set 각 클래스 별 샘플 수)은 많아지면 많아질수록 정확도가 더 상승한다.
문제에 대한 예시가 많아질수록 더 답을 찾아내기 수월해질 것이기에 정확도가 상승할 수 밖에 없을 것이다.
Few-shot learning basic idea
few-shot learning의 기본 아이디어는
유사성을 예측하는 함수 -> sim(x, x')
를 훈련시키는 것이다.

위의 예제에서 각각의 similarity를 계산하면 다음과 같은 결과가 나올 것이다.
sim(x1, x2) = 1 -> x1과 x2는 유사한 object
sim(x1, x3) = 0 -> x1과 x3는 다른 object
sim(x2, x3) = 0 -> x2와 x3는 다른 object
위와 같은 아이디어는 다음과 같이 구현될 수 있다.
- large-scale 훈련 데이터셋을 통해 유사성 함수를 훈련한다.
- 유사성 함수를 prediction에 적용한다.
- support set에 있는 모든 샘플을 query와 비교한다.
- 가장 유사성 점수가 높은 샘플을 찾는다.
이제 이 few-shot learning을 구현하기 위한 네트워크 구조에 대해서 살펴보도록 하자.
Siamese Network (샴 네트워크)
Preparing Training Dataset
Siamese Network를 학습하기 위한
training set은 다음과 같이 positive samples과 negative samples로 구성된다.

CNN for Feature Extraction
train dataset이 구성되었다면, feature extraction을 위한 CNN 모델을 구성한다.

Training Siamese Network
이제 훈련 데이터를 이용해 모델을 학습 시킨다.

- f : cnn for feature extraction. 같은 신경망임.
- h1, h2 : feature vectors about x1 and x2
- z : |h1 - h2| 두 feature vector 사이의 차이.
모델은 두 개의 파트로 이뤄져 있다.
하나는 CNN(f). input image의 feature를 extracting해준다.
input image가 두 개이기 때문에 두 개의 CNN이 적용되는데,
이 때 두 개의 CNN은 같은 CNN(같은 구조. 같은 모델 파라미터.)임을 명심하자.
다른 하나는 fully connected layers(Dense layers)로
vector z를 0에서 1사이의 스칼라 값으로 mapping해준다.
훈련 중에는 두 파트(f, z) 모두 업데이트된다.
역전파를 통해 gradient는 loss 함수에서 z vector와 dense layer의 parameter로 흐른다.
이 때 gradient를 통해 경사 하강법에 의해 매개변수가 업데이트된다.
더 나아가 gradient가 Convolutional layer에도 넘어가 마찬가지로 f의 매개변수 또한 업데이트된다.
One-Shot Prediction
학습을 마친 후 모델을 one-shot prediction에 활용할 수 있다.
다음 예제를 보자.

6-way 1-shot Supprot Set과 다람쥐 객체가 있는 이미지가 Query로 주어지고 있다.
우리는 모델을 통해 Query와 Supprot Set에 있는 한 이미지를 1:1로 비교할 수 있다.
비교 결과는 다음과 같이 나올 것이다.
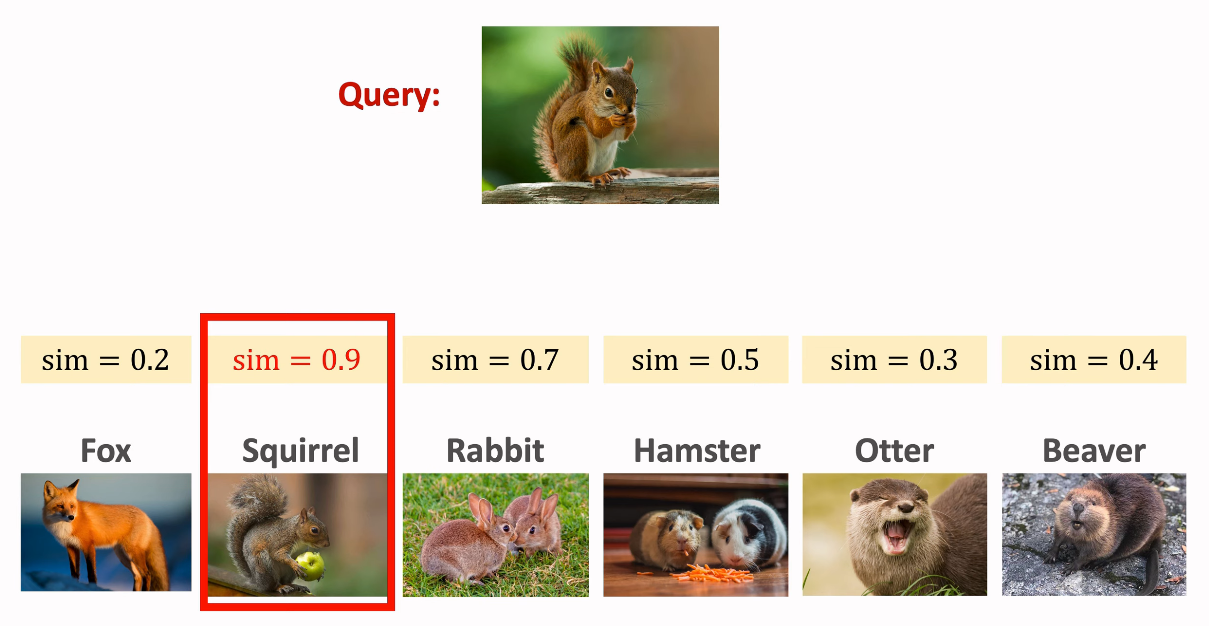
나온 결과 중 Support Set의 Squirrel(다람쥐) 클래스 이미지와 Query 이미지가 유사성이 가장 높기 때문에 우리는 Query가 다람쥐 클래스라는 결론을 도출해낼 수 있게 된다.
Triplet Loss
Preparing Training Dataset
아까와는 살짝 Training Dataset을 구성하는 방법이 달라진다.
- 클래스에서 한 데이터를 랜덤하게 선택한다. 이를 anchor라고 칭한다.
- 같은 클래스에서 다른 데이터를 랜덤하게 선택한 후, 이를 Positive Sample로 활용한다.
- 이제 선택한 클래스가 아닌 그 외의 클래스를 랜덤하게 선택하고, 정해진 클래스 내에서 랜덤하게 데이터를 선택하여 이를 Negative Sample로 활용한다.
그러면 다음과 같이 세 개의 데이터가 선정되게 될 것이다.
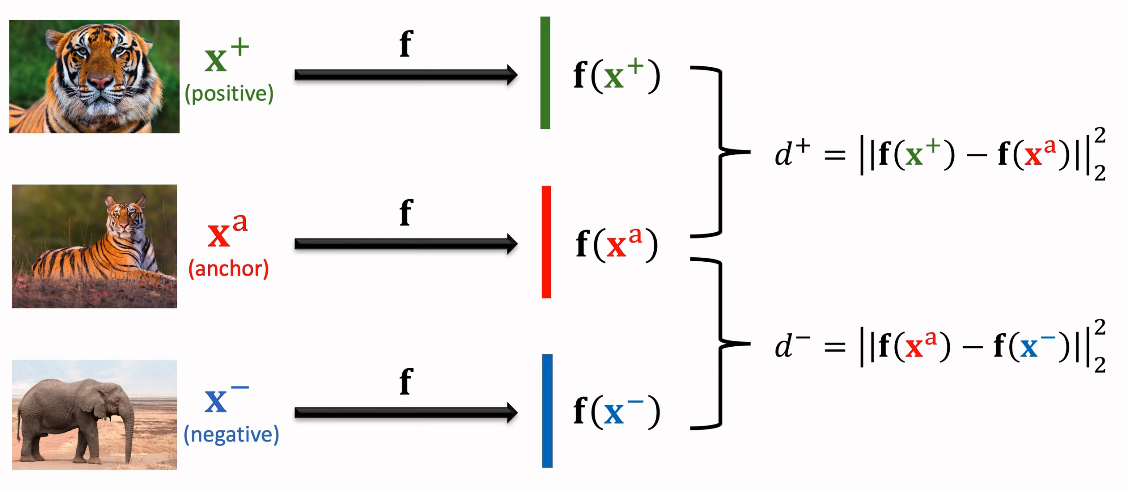
이 세 개의 데이터에 같은 CNN f를 적용해주어 feature들을 extrating한다.
그 후에 postive sample feature와 anchor sample feature의 distance d+와
negative sample feature와 anchor sample feature의 distance d-를 구한다.
이렇게 구한 d+는 같은 클래스 사이의 거리이기 때문에 값이 작을 것이고,
d-는 다른 클래스 사이의 거리이기 때문에 값이 클 것이다.

이를 시각화하면 다음과 같이 나타날 것이다.
그러나 이러한 결과를 낸다고 해도 모델이 호랑이와 코끼리를 구분할 수는 없다.
위의 아이디어를 기반으로 loss function을 정의하자.
d+는 positive sample과 anchor sample 간 L2 제곱 거리이다.
그리고 두 샘플은 같은 클래스기 때문에 거리가 가까워야 할 것이므로,
d+의 값이 작아지도록 해야 한다.
반대로 d-는 negative sample과 anchor sample 간 L2 제곱 거리로,
거리가 멀어야 하므로,
d-의 값이 크도록 해야 할 것이다.
우리는 α라는 margin을 정의할 것이다.
α는 양수이며 tuning hyper parameter이다.

만약 d+와 α를 더한 값이 d-보다 작다면 classification이 제대로 수행된 것으로 판단하여, loss 값은 0이 된다.
그러나 그 반대의 경우라면 loss의 값을 d+ + α - d-로 설정하여 loss가 작아지도록 한다.
loss가 작다는 것은 d+가 작다 즉, positive와 anchor 사이의 feature space가 가까워지는 것을 의미하게 되며,
negative와 anchor 사이에서는 feature sapce가 멀어지며 확실하게 분리될 수 있도록 한다.
그래서 최종적으로 아래와 같은 loss function(max{0, d+ + α - d-})을 얻게 된다.
이와 같은 loss를 triplet loss라고 한다.
이는 anchor sample, postivie sample, negative sample로 이뤄진 세 쌍둥이 샘플을 기반으로 구해지는 loss라서 triplet loss라고 칭한 듯하다.
이제 아까와 똑같은 예시를 갖고 위의 과정을 통해 훈련된 Siamese Network가 어떤 식으로 결과를 도출할지 알아보자.
주어진 Support Set과 Query는 아까 확인한 예제와 같다. (6 shot 1 way Support Set & Squirrel Query)
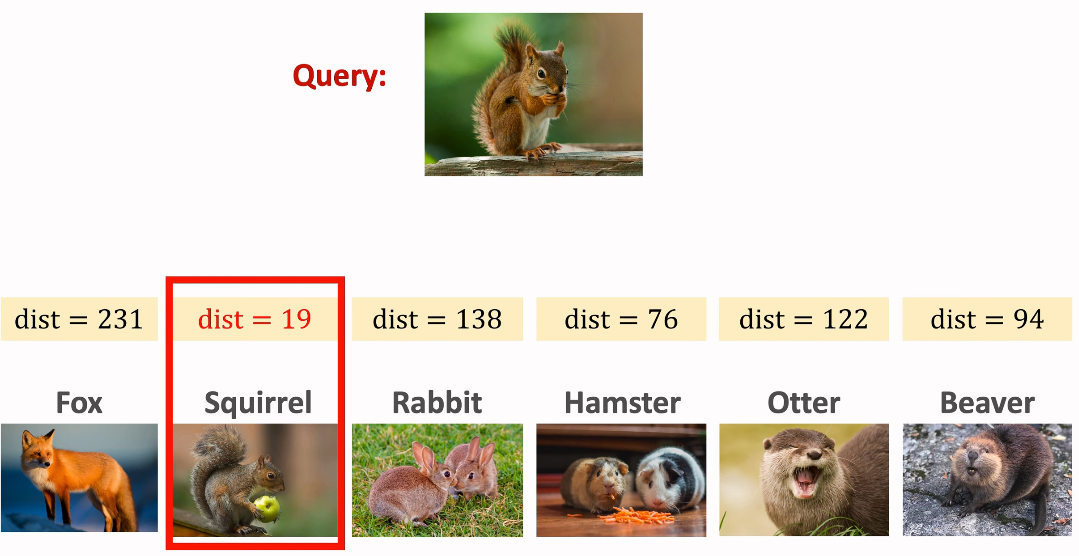
위와 같이 Query 이미지와 Support Set 각 이미지에 대한 distance가 결과로 나오게 되는데
이를 통해 Query 이미지와 Squirrel Support Set이 가장 짧은 거리를 가진 것을 확인할 수 있고,
Query 이미지가 Squirrel 클래스라는 것을 알 수 있게 된다.
Pretraining and Fine tuning
preliminary
Cosine Similarity
두 벡터간 similarity 계산.
ex)
x와 w 벡터가 있다.
이 두 벡터는 unit vector(길이가 1인 벡터)라고 가정한다.
||x||_2 = 1 & ||w||_2 = 1
이는 두 벡터의 L2 norm이 1로 같다는 것을 의미한다.
이 때 x와 w 벡터는 unit vector이기 때문에
cosine Θ는 x와 w의 inner product(내적)와 같다.
cosine Θ는 x와 w 사이의 유사성을 계산할 수 있다.
cosine similarity는 다음과 같은 식으로 이해할 수 있다.
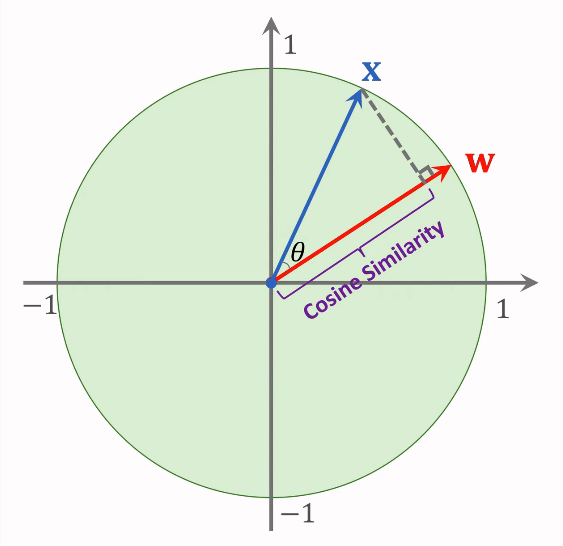
벡터 x를 w에 걸쳐 있는 선에 투영한다.(회색 점선)
투영의 길이가 바로 코사인 유사도가 된다.
만약 x와 w가 unit vector가 아니라면 cosine similarity를 계산하기 전
두 벡터를 unit vector로 normalize해 줄 수 있을 것이다.
cosine similarity는 다음의 방정식으로 도출해낼 수 있다.

x 벡터와 w 벡터 각각 normalize한 후
그들의 inner product(=cosine similarity)를 계산한다.
Softmax Function
굉장히 흔하게 사용되는 activation 함수이다.
이는 벡터를 확률 분포로 mapping한다.
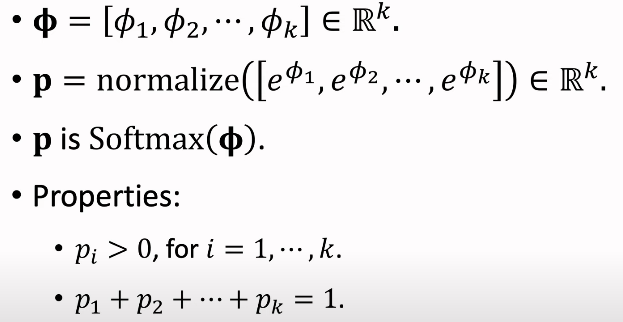
input은 Φ(phi)이며 k차원 벡터이다.
softmax는 k postive numbers를 얻기 위해서 모든 Φ의 k개 elements들에 exponential function을 적용하고
normalize한다.
이 때 input과 output은 모두 k차원 벡터이며
output vector p의 모든 요소는 모두 양수이고, 다 합치면 1이 되어
p는 확률 분포가 되게 된다.
softmax는 multi-class classifier output에 적용된다.
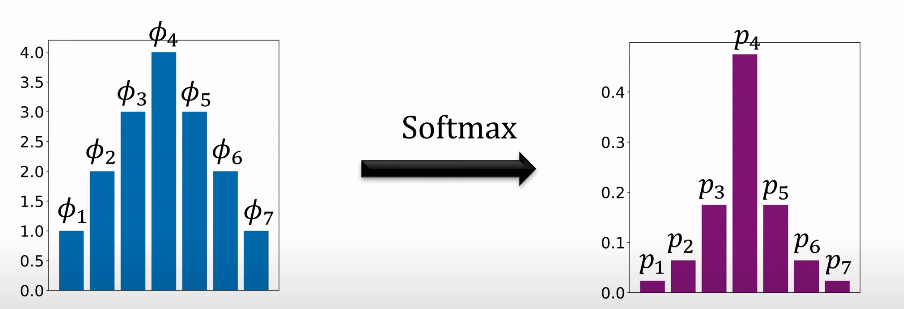
위는 softmax의 예시이다.
softmax 함수는 값이 가장 큰 항목은 더 크게 만들고, 다른 항목은 작게 만든다.
왜 이를 softmax라고 부를까?
만약 우리가 max 함수를 사용하면 가장 큰 항목은 1로 mapping되고 나머지는 0으로 mapping된다.
그러나 softmax는 max 함수와 역할은 유사하나 극단적으로 큰 항목을 1로 변환하지는 않고
작은 항목을 0으로 변환하지는 않는다. 과하지 않게 max를 적용한다고 생각하면 될 듯.
Softmax Classifier
Softmax classifier은 dense layer와 softmax activation으로 구성된다.

classifier의 input은 feature vector x이다.
x에 parameter matrix w를 적용하고, vector b를 더한다.
마지막으로 softmax function을 적용한다.
그러면 vector p가 output으로 나오게 된다.
만약 클래스 개수가 k개라고 하면, vector p는 k차원일 것이다.
위에서 matrix w와 vector b는 softmax classifier에서 trainable한 파라미터이다.
matrix w는 k개의 행을 갖는다. k는 클래스의 개수이며, 모든 행은 클래스에 해당한다.
Few-Shot Prediction Using Pretrained CNN
Pretraining

이전에 앞서 보았던 것처럼 feature extration을 위한 CNN을 준비한다. (aka embedding)
위 CNN은 표준 지도 학습이나 샴 네트워크를 통해 pretrained 될 수 있다.
feature prediction method

위 예제는 3-way 2-Shot Support Set을 나타낸다.
각 이미지에 CNN을 적용해 feature vector를 얻어낸다.
위 예제는 클래스 당 2개의 샘플이 있으므로 각 두 개의 feature vector가 나올 것이다.
이 때 나온 두 feature vector의 제곱 평균을 내어 평균 vector를 구한다.
위 예제는 세 개의 클래스가 있으므로 세 개의 mean vector가 나올 것이다.
그 후 세 개의 mean vector를 normalize해주어 unit vector로 변환하여준다.
각 unit vector는 μ1, μ2, μ3으로 나타낸다.
μ 벡터는 future prediction 때 euclidean 공간에서 각 클래스의 embedding이다.
이를 query와 비교할 것이다.
Making Few-shot Prediction
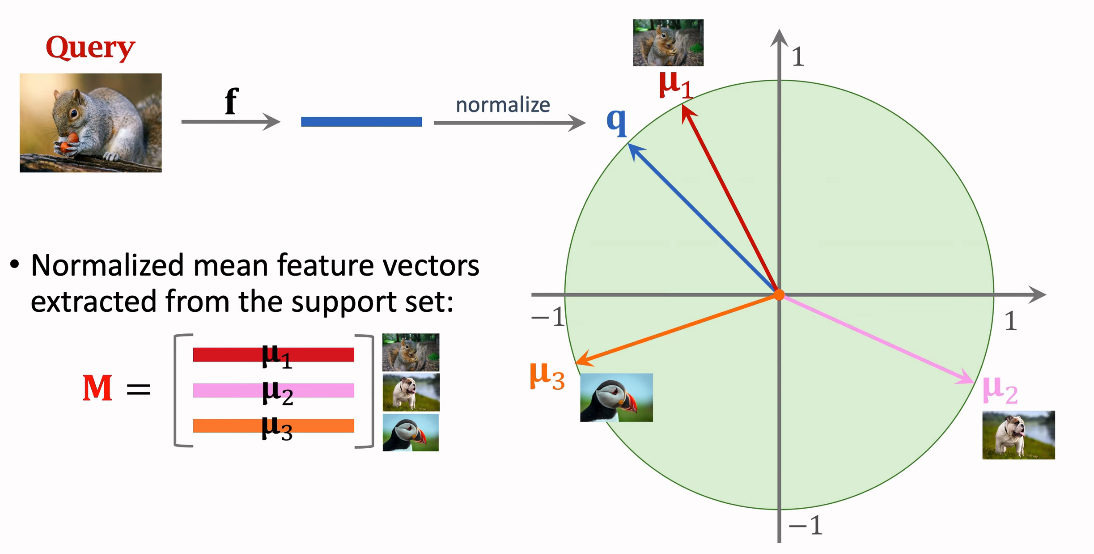
query 이미지에 CNN을 적용해 feature를 extracting하고, 이를 normalize해서
unit vector로 변환한다. 이를 q라고 하자.
그리고 우리는 앞서 Support set에서 세 개의 μ 벡터를 구했다.
이 세 개의 μ 벡터를 쌓은 matrix를 M이라고 하자.
각 μ 벡터는 matrix M의 행이 된다.
이제 prediction을 만들어보자.
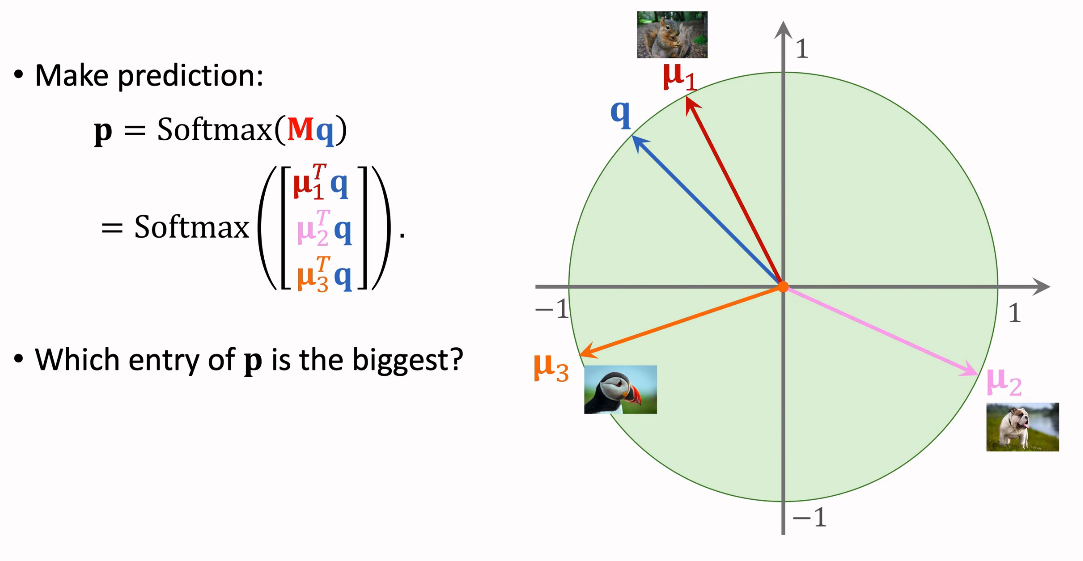
matrix M과 q에 Softmax를 적용하자.
세 항목 중 가장 값이 큰 것은 명백히 첫 번째 항목일 것이다.
그렇기 때문에 모델은 query 이미지가 첫 번째 이미지인 squirrel이라고 예측해낼 수 있을 것이다.
Fine-Tuning
앞서 우리는 pre-trained model을 통해 예측을 진행하였다.
이제 여기에 더하여 pre-training 이후에 fine tuning을 수행할 수 있다.
최근 연구는 fine-tuning이 예측 정확도를 높일 수 있다는 사실을 입증했다.
Few-Shot Prediction Using Pretrained CNN
(x_j, y_j)로 이뤄진 support set의 sample이 있다고 가정하자.
여기서 x_j는 이미지이고,
y_j는 레이블이다.
f(x_j)는 pretrained CNN에 의해 추출된 특징 벡터이다.
p_j = Softmax(W ● f(x_j) + b)는 확률 분포이다.
이 때 W는 세 개의 클래스를 지닌 Support set이라 가정한다.
그러면 p_j는 세 개의 클래스에 대한 확률 혹은 confidence score가 된다.
이전에 우리는 fine tuning을 이용하지 않고, W와 b를 데이터로부터 학습하는 것대신
단순히 W=M으로, b=0으로 고정했다.
이에 대한 Fine tuning으로 Support Set을 통해 W와 b를 학습되도록 한다.
W와 b는 다음과 같은 방법으로 학습될 수 있다.

- CrossEntropy를 활용해서 y_j와 예측값인 p_j의 차이를 계산한다. -> loss
- 나온 CrossEntropy들을 합한 값을 목적 함수로 사용한다. (support set의 모든 샘플들의 loss를 더한 값)
- minimization은 p_j가 ground truth y_j로 접근하도록 한다.
- Optimization variable
- W and b
- Parameters of the CNN
- Optimization variable
- 과적합을 방지하기 위해 Regularization을 사용한다.
- 최근 연구에서는 entropy regularization을 추천한다.
Benefit of fine tuning
- fine tuining은 예측 정확도를 상당히 향상시켰다.
- 5-way 1-shot에서 2%~7% 정확도 향상
- 5-way 5-shot에서 1.5%~4% 정확도 향상
- 그 외 다른 연구에서도 비슷한 결론이 나옴.
- 정교한 SOTA methods들과 비교할만 함.
Fine-Tuning Trick 1 : A Good Initialization
예측값은 sofmax classifier에 의해 나온다.

이 때 W와 b는 학습 가능한 파라미터로, 이 두 파라미터를 잘 초기화하는 것은 굉장히 도움이 된다.
특히 support set의 크기가 작을 때 랜덤하게 초기화하는 것은 좋은 조건이 아니다.
랜덤하게 초기화하는 대신 W=M으로, b=0으로 초기화하는 것이 좋다.
Fine-Tuning Trick 2 : Entropy Regularization
Softmax classifier는 작은 supprot set에 의해 학습되기 때문에 과적합이 발생할 수 있다.
이 때 과적합 방지를 위해 entropy regularization을 추천하고 있다.
x는 query 샘플이다.
f(x)는 이미지에서 추출된 특징 벡터로, softmax classifier의 input값이다.
p는 softmax classifier에 의해 나온 예측값이며 확률 분포이다.

entropy를 통해 퍼져 있는 분포를 계산할 수 있다.
p_i는 벡터의 i번째 요소이다.
p의 모든 요소에 대해 p_i * log(p_i)를 계산 후 음수로 만든다.
이렇게 하면 모든 쿼리에 대해 entropy가 나오게 된다.
그리고 이에 대한 평균을 구하는 것이 entropy regularization이다.

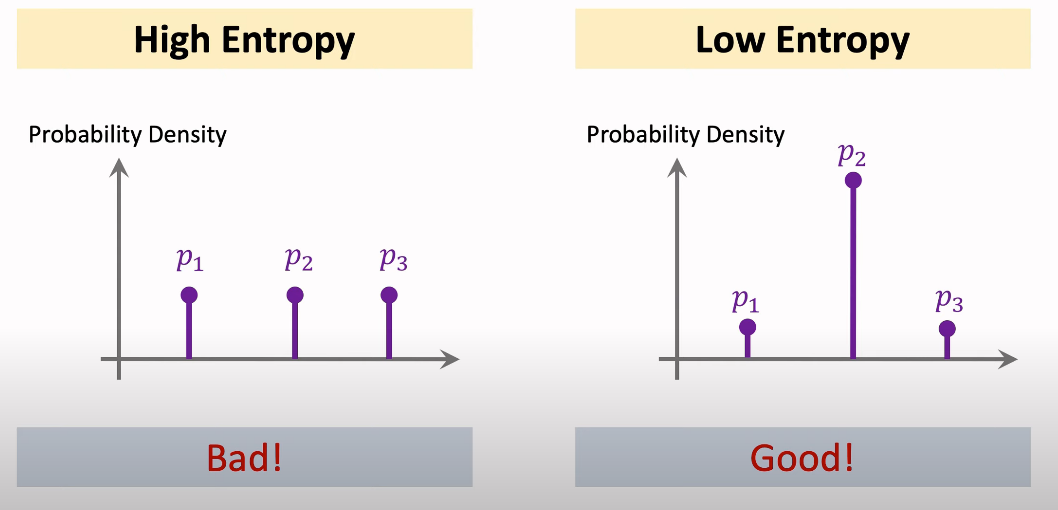
entropy가 높을수록 classifier가 제대로 일을 하지 못하고 있다는 의미이므로,
entropy를 최대한 작게 만들어주어야 한다.
Fine-Tuning Trick 3 : Cosine Similarity + Softmax Classifier
앞서 봤던 Softmax Classifier에서 inner product를 cosine similarity로 교체하는 방법이다.

여기서 Consine similarity는 normalization 이후 내적값이다.
w와 q를 l2 norm으로 나누어 normalize한 값이다.
'AI > AI 기초' 카테고리의 다른 글
| Validation Loss가 Training Loss보다 낮을 수도 있는 이유 (0) | 2022.03.10 |
|---|